Each RigPi window has functions that are present on all RigPi windows.
Function |
Where is it |
Description |
|---|---|---|
RigPi Logo |
Red "Pi" logo at left end of the RigPi Menu bar |
Click to open the RigPi web site: https://rigpi.net |
RigPi Menu Bar |
Top of RigPi window |
A menu bar is provided to open RigPi windows. Several menu items have drop-down lists showing additional options. The Access Level you set in the User Editor window determines which menu items may be hidden. The SETTINGS menu is shown in full for ADMIN users, access level 1. Hide the SETTINGS menu by using a higher access level. The Users and System options are not shown for access level 2. The SETTINGS menu is not shown at all for access level 3. The Keyer is not shown for access level 4. Use level 10 for PTT-only. |
Callsign Lookup |
Right end of RigPi Menu bar |
Look up callsigns using the RigPi FCC Database, or the optional QRZ XML subscription database. Type a call and press Enter on your keyboard or click the magnifying glass button, to look up a call. The focus call is carried from window-to-window, and restored the next time you start RigPi. (QRZ XML access requires an Internet connection and a paid subscription.) |
Log Out |
Right end of RigPi Menu bar |
Log out from the current RigPi account. |
Radio Status Bar |
Bottom of RigPi window |
The radio status bar at the bottom of each RigPi window shows Main frequency, Sub frequency (if Split is turned on), mode, passband, the current user and user name, and the current UTC time. |
Callsign Lookup
The Callsign Lookup panel shows detailed information for the entered call. The information comes from the onboard FCC database, or if enabled with a username and QRZ password, from the QRZ XML subscription service. At the bottom of the panel you can control your rotor by clicking Rotate or Stop. Set up you rotor in SETTINGS>Rotor. Note RSS comes with the Hamlib Dummy rotor installed for you.
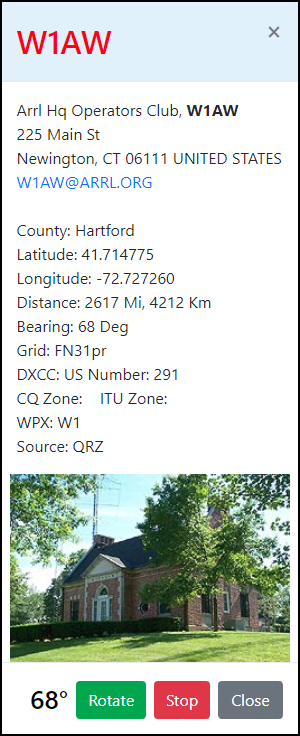
Note: The distances and bearings are relative to your location. If you have not entered your location accurately in SETTINGS>Accounts->User Editor, the bearings and distances will not be correct.